
Flugzeuge
- Details
- Hits: 5684
Nun ist der Adler endlich richtig geflogen, doch zurück zum Anfang. Eigentlich habe ich ja in meinem Hangar keinen Platz mehr für ein weiteres Flugzeug, aber als ich die Eagle von Planeprint (Planeprint, Modell Eagle) gesehen habe, hat es mich nicht mehr los gelassen. Ich habe mir das Testdruckfile von Planeprint herunter geladen, mir eine Rolle PLA-LW von Colorfabb besorgt und nach der Anleitung von Colorfabb und anschließend den Settings von Planeprint den Testkörper gedruckt. Dabei konnte ich den Fluss bis auf 30% reduzieren und bekam immer noch gute Testkörper raus. Planeprint gibt an, mit 60% Flussrate zu drucken. Nun ich habe mich dann für 50% entschieden.
Hier ein kurzes Review.
- Details
- Hits: 4994

Seit einigen Jahren besitze ich eine Eurofighter die original von Freewing stammt. Allerdings habe ich schon einige Modifikationen an dem Teil durchgeführt und sie sieht klasse aus. Die Sache hatte aber immer einen Haken: ich konnte die Eurofighter auf unserem Platz nur unter extrem guten Bedingungen starten. Dieses Jahr wollte ich wieder einmal versuchen, das Teil in die Luft zu bekommen. Der Rasen war super kurz gemäht. Ein neuer Akku war frisch geladen eingebaut, Gegenwind. Ich gebe vollgas, die Eufi stürmt davon, kommt aber nicht auf Geschwindigkeit, das Bugrad federt immer wieder bis auf Block ein und die Ailerons wirken wie Spoiler, die die Eufi weiter auf den Boden drücken. Ich habe an diesem Nachmittag fünf Startversuche gemacht, alle vollkommen erfolglos. Anschließend war wieder das Bugfahrwerk und ein Hauptfahrwerk durch die Stöße so verbogen dass es repariert werden musste. Ich war demotiviert. Das Bugfahrwerk versteifen? Könnte was bringen, aber was ist, wenn dann, ohne Federung, das Fahrwerk noch schneller verbiegt, nicht mehr eingefahren werden kann oder gar klemmt? Ich hatte schon die Situation, dass der Eisenpin durch die Schläge beim Rollen in den Antriebsmechanismus getrieben wurde und dadurch das Fahrwerk blockierte.
Eine Lösung musste her. Entweder Handstart und den Bodenbereich des Eufis massiv mit Kohlefaser verstärken oder ein ... Einrad-Fahrwerk, wie das jemand im RC-Forum gemacht hatte (Verkaufsanzeige). Das Einrad konnte groß sein, es konnte nahe am Schwerpunkt sein und die Eufi würde hinten durch die beiden Plastikteile an den Düsen aufliegen und auf Spur gehalten werden. Das könnte gehen... Ich habe mich ans Werk gemacht. Das Einziehfahrwerk, die Servos, Hebelchen, Klappen und der Doorsequenzer wurden von mir ausgebaut. 380g weniger Gewicht im Flieger! In die Klaffenden Löcher mußte jetzt was rein:
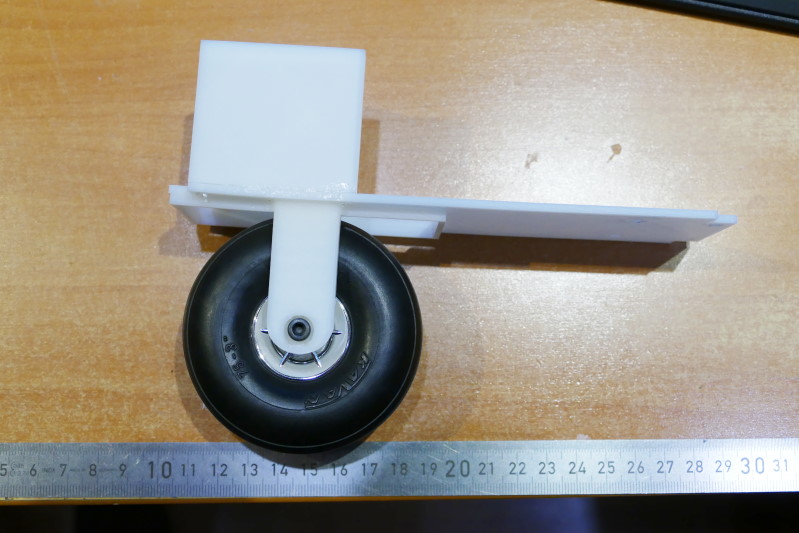
Ein Rad war schnell auss dem Fundus gefunden: KAVAN 75mm, 4mm Bohrung, 27g. Das war groß genug und hatte auch ausreichend Traglast.
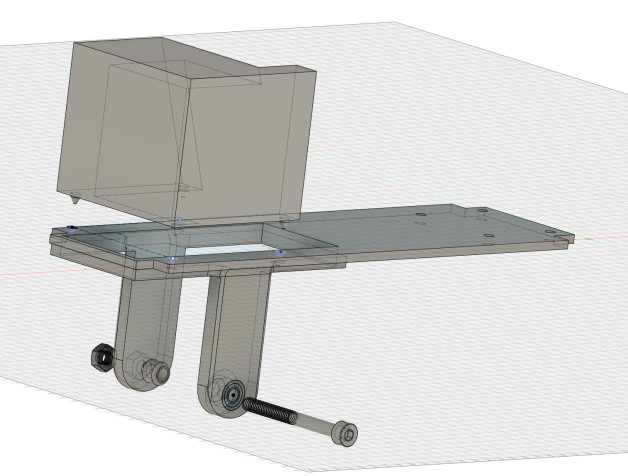
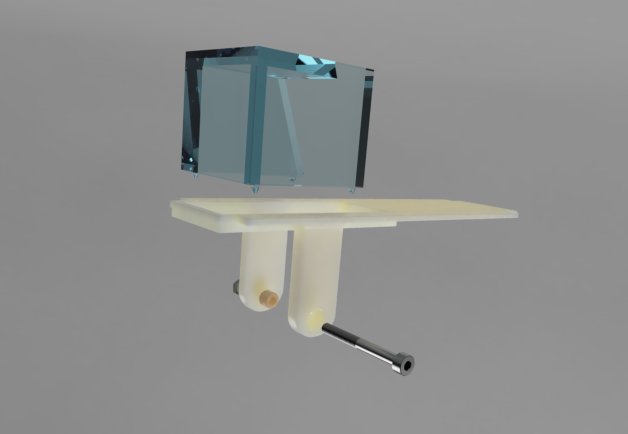
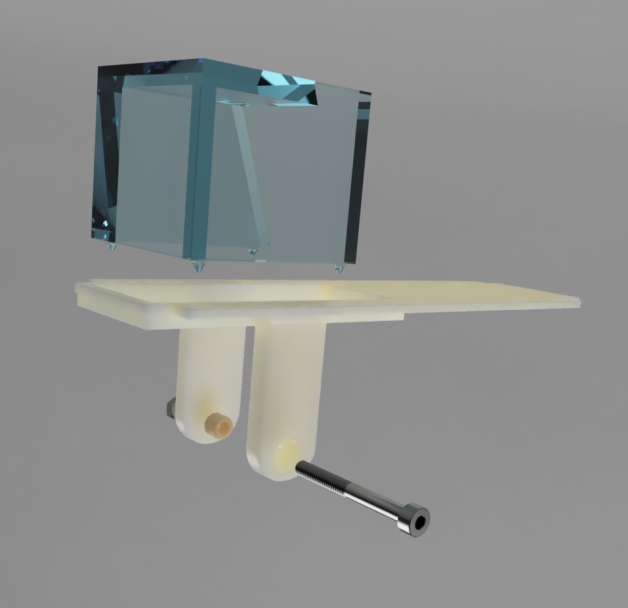
Im zweiten Entwurf war die Konstruktion schon richtig gut. Hier die simulierte Ansicht. Der Glaskasten ist das Stück, das gegen den Eurofighter drückt.
Mit ABS gedruckt schaute das ganze dann so aus:




Erstflug mit Monorad
Ich war auf den Start gespannt. Würde die Eufi starten oder würde sie sich überschlagen oder wieder nicht auf Geschwindigkeit kommen?
Ich habe Gas gegeben und die Eurofighter bis kurz vor das Platzende (wir hatten Windstille) getrieben. Das Höhenruder angelupft und sie war frei.
Der leichtere Part war geschafft. Nach ein paar Platzrunden kam dann noch die Landung. Die Eufi schwebte ein, setzte auf und rollte brav aus.
Die Neukonstruktion hat meiner Eurofighter ein neues Leben eingehaucht! Ich kann sie jetzt auf unserem Platz fliegen.



Die Dateien zum Nachdrucken sind auf Thingiverse zum herunterladen:
Oder auch hier:
Hier noch ein kleines Video vom Erstflug mit dem Monorad:
- Details
- Hits: 4891

Seit ich Modellbau betreibe wollte ich schon immer einmal eine A-10 haben. Ich fand den Flieger einfach klasse. Auch die Geschichte der A-10 war ein Grund, warum ich mich mit dem Flugzeug beschäftigt habe. Die A-10 ist das Produkt aus der eigenwilligen Struktur der US-Streitkräfte. Diese sind strikt zwischen Airforce, Marine und Bodentruppen getrennt. Diese Trennung führte dazu dass die Airforce den Fokus auf immer schnellere, höher fliegende Jets legte. Dabei wurde vergessen, dass mit Mach 2 fliegender Jet mit einer Operations-Flughöhe von mehreren tausend Metern für die Unterstützung der Bodentruppen gänzlich ungeeignet war. Die folge war, dass die Armee für ihre Bodentruppen eine eigene Lösung schaffen wollten. Dies sollte mit einem neu zu entwickelnden Kampfhubschrauber passieren. Das wollte die Airforce nicht, denn die hatten für alles was fliegt die Kompetenz und bekamen dafür auch das Geld. Um wieder in´s Geschäft zu kommen wurde als Konkurrenz zum Apache-Hubschrauber ein neuartiges Bodenkampfflugzeug entwickelt - einfach, robust und effektiv. Die A-10 war geboren - auf dem Reisbrett. Eigentlich nahm man eine riesige Gattling-Kanone von GE und baute ein Flugzeug herum. Das hatte aber gravierende Auswirkungen. Bei den Testflügen gelang so viel Pulverdampf in die Triebwerke, dass diese während des Schießens ausfielen, ein ernstes Problem. Nach vielen Versuchen mit Leitblechen und anderen Lösungen bekam man das Problem in den Griff. Die A-10 ist einfach aufgebaut, hat keine Flügeltanks ist billig in der Anschaffung und im Unterhalt. Sie war kein "Wunschkind" und musste sich ihren Platz durch Leistung und Ausdauer immer wieder erkämpfen. Das zum Original.
- Details
- Hits: 5221
Jetzt war auch "schon" der Erstflug meiner Tigercat. Der war allerdings Teamwork.

- Details
- Hits: 5237
Nachdem ich auch noch die Decals selbst gemacht habe (Folienplotter), ist heute das erste Fotoshooting im Freien gewesen. Hier die Bilder dazu.
