
Eigentlich bin ich Lichtjahre von dem Hobby Robotik entfernt - teuer und zeitaufwändig, das war bisher meine Meinung. Außerdem, so dachte ich, brauch man mindestens eine Feinmechanik-Werkstatt. Dann bin ich durch Zufall auf einen Bausatz der Firma Sunfounder gestoßen. Eine Robo-Krabbe, die mit 12 Achsen in Youtube äußerst beweglich erschien. Ok, das war noch nichts besonderes. Besonders macht den Bausatz der Preis: für rund 100EUR bekommt man alle Bauteile, die zum Bau des Roboters nötig sind - bis zur kleinsten Schraube. Nicht im Bausatz sind die Akkus, doch dazu später.

Nach kurzer Überlegung habe ich mir das Teil bei Amazon bestellt, und am nächsten Tag bekommen.
Der Bausatz kommt in einem unscheinbaren Karton, bei dem ich mich gefragt habe, ob das alles ist.

Tatsächlich, außer der Software, die von der Herstellerhomepage herunterladbar ist, ist alles dabei. Alle Bauteile sind sauber verpackt und gut beschriftet - da kommen keine Zweifel bei der Identifizierung auf. Das ist sehr Lobenswert. Der Schraubenzieher ist bei mir aber gleich in den Abfall gewandert. Da ist ein hochwertiger Schraubenzieher hilfreich, schließlich werden demnächst damit über 100 Schrauben damit "gezogen".

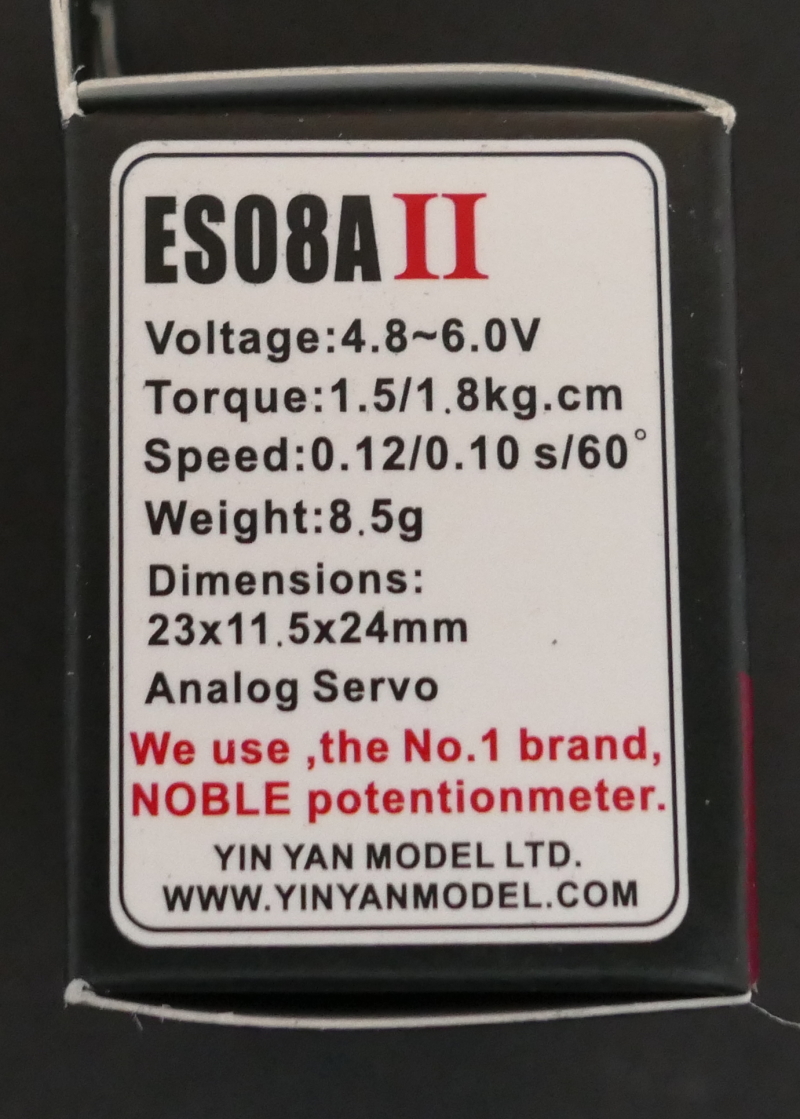
Die Servos sind Standard-Billigservos. Für den Roboter sind sie ausreichend und es findet sich auf dem Markt vieles an Ersatz.
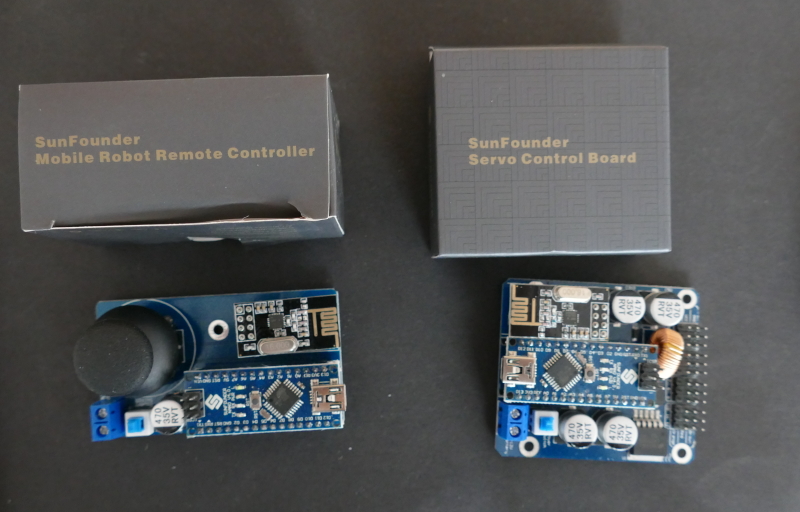
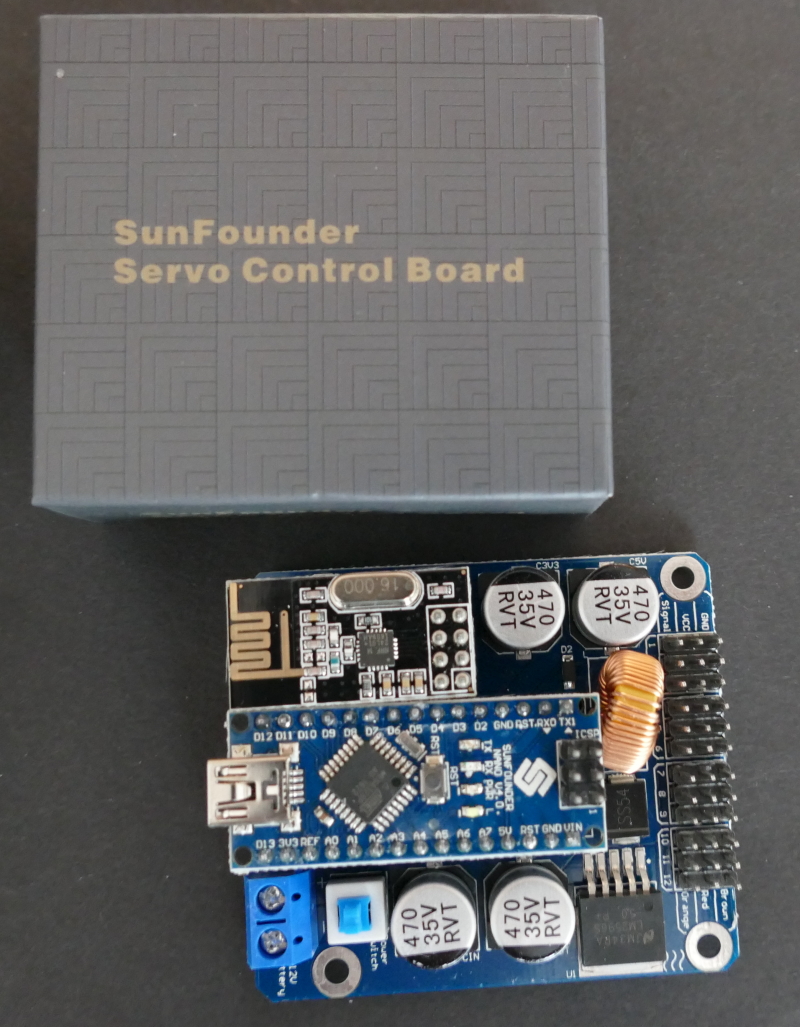
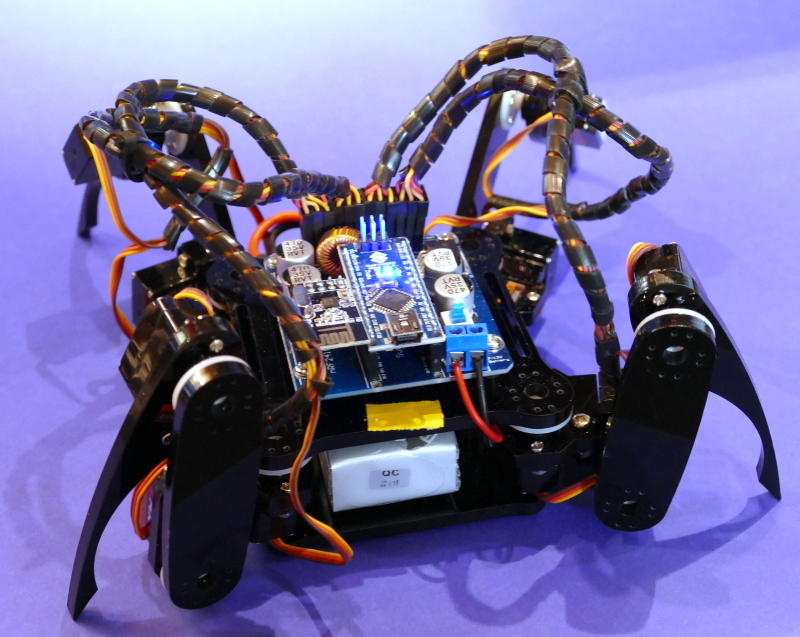
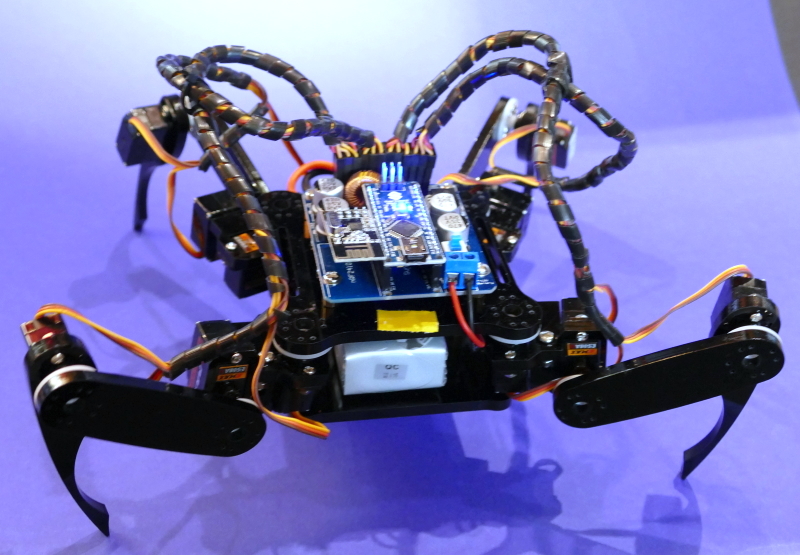
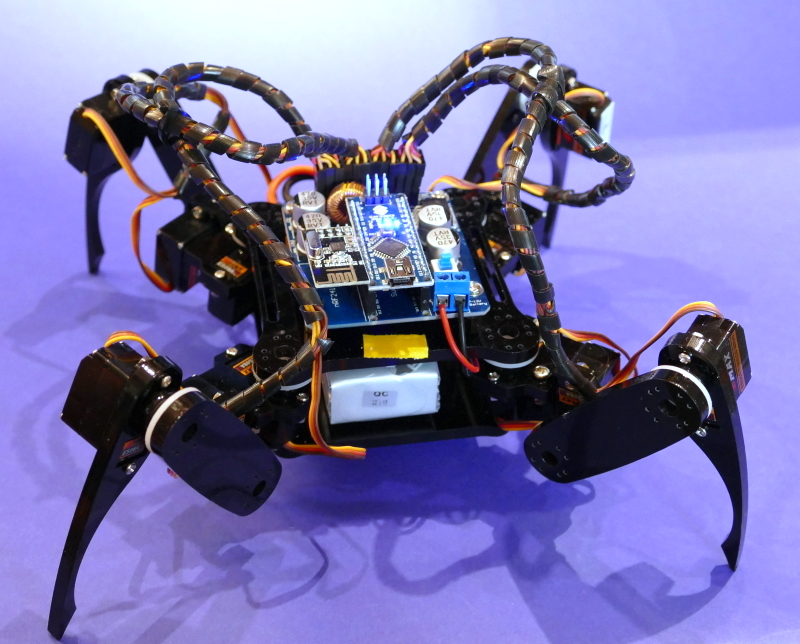
Der Roboter wird über zwei Module gesteuert. Das erste Modul sitzt auf der Krabbe (Servo Controller Board). Es besteht aus einem Arduino Nano (Standard) und einem Servo-Controllboard mit Schaltregler-Versorgung. Letzteres ist sehr erfreulich, da damit ein Akku im Bereich von 7-12V eingesetzt werden kann. Der Arduino wird von dem Board ebenfalls versorgt. Ich habe als Stromversorgung abweichend zur Anleitung einen Lipo 3s 1000mAh eingesetzt. Dafür habe ich ein gutes Ladegerät.
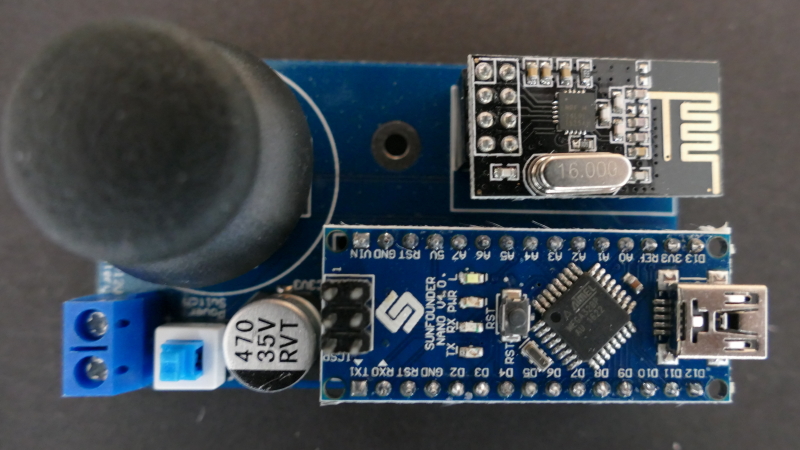
Das zweite Modul ist der Sender (Mobile Robot Remote Controller). Dieser besteht wieder aus einem Arduino-Nano-Board, eine 2,4Ghz Wifi-Modul und eine Basisplatine. Auch hier genügt eine Spannungsversorgung im Bereich 7V..12V.
Hier alle nötigen Schrauben und Montagematerialien. Bei den Schrauben sind auch einige Überzählige dabei, falls sich einmal ein Schräubchen aus dem Staub mach.

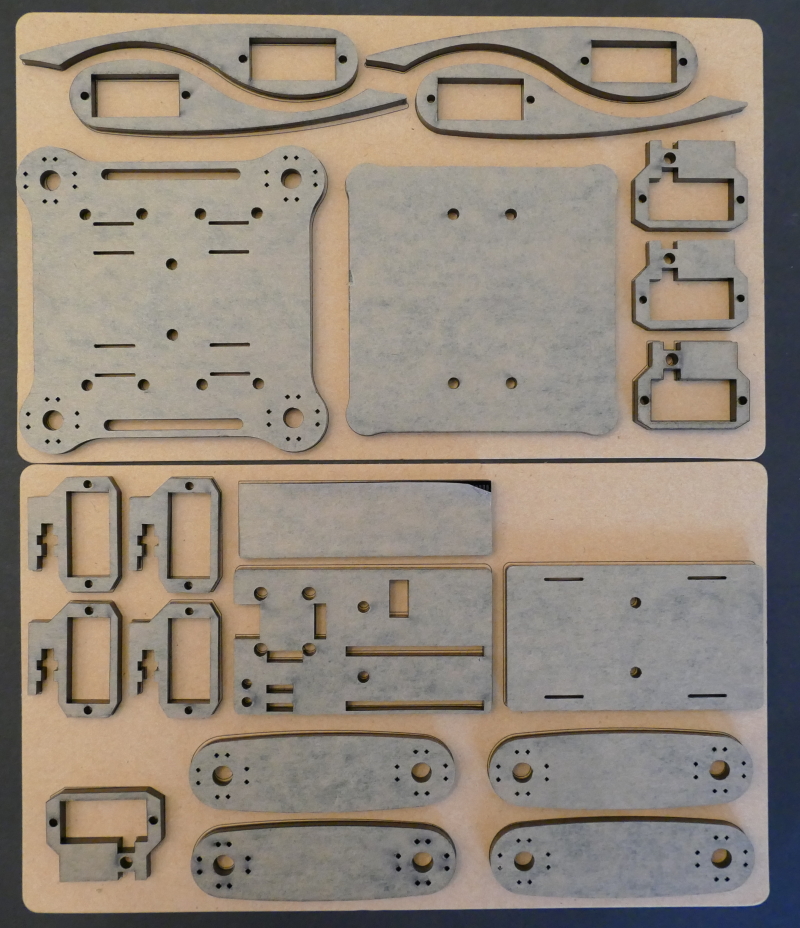
Hier sind die Konstruktionselemente der Krake zu sehen. Sie sind sauber ausgeschnitten, Montagelöcher sind bereits vorhanden und die Teile sind überraschend passgenau.
Alle Elemente tragen beidseitig eine Schutzfolie gegen Transportschäden.
Die beiliegende Anleitung ist gut, aber ich bin mit ihr trotzdem an Grenzen gestoßen. Zum Glück hat die Herstellerfirma dien Zusammenbau der Krabbe in Youtube als Filme hinterlegt. Diese Anleitung empfand ich deutlich besser. Ein paar Fragen tauchten auch bei dem Software-Code auf. Dieser wird mit der Arduino-IDE auf die beiden Arduinos geladen.
Nach dem Zusammenbau muss die Krabbe kalibriert werden. Dazu liegt dem Bausatz ein Papier bei. Die Krabbe wird per Software in eine definierte Position gebracht, die Kalibriersoftware fährt die Servos in eine bekannte Position und nun muss die Differenz zwischen der erwarteten Beinposition und der Realität in die Software übernommen werden. Nun sind alle mechanischen Toleranzen eliminiert.
Nach zwei Abenden war dann meine Krabbe fertig und Kalibriert.
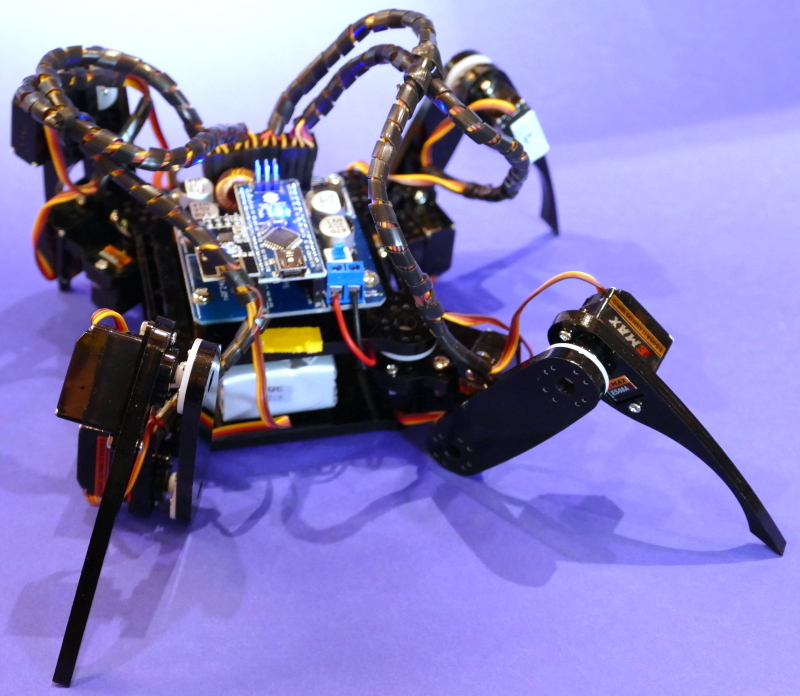
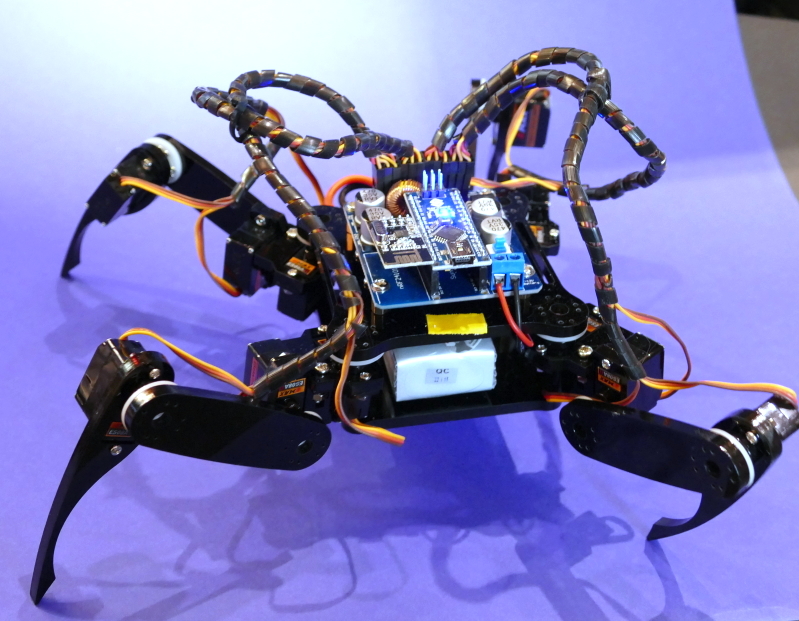
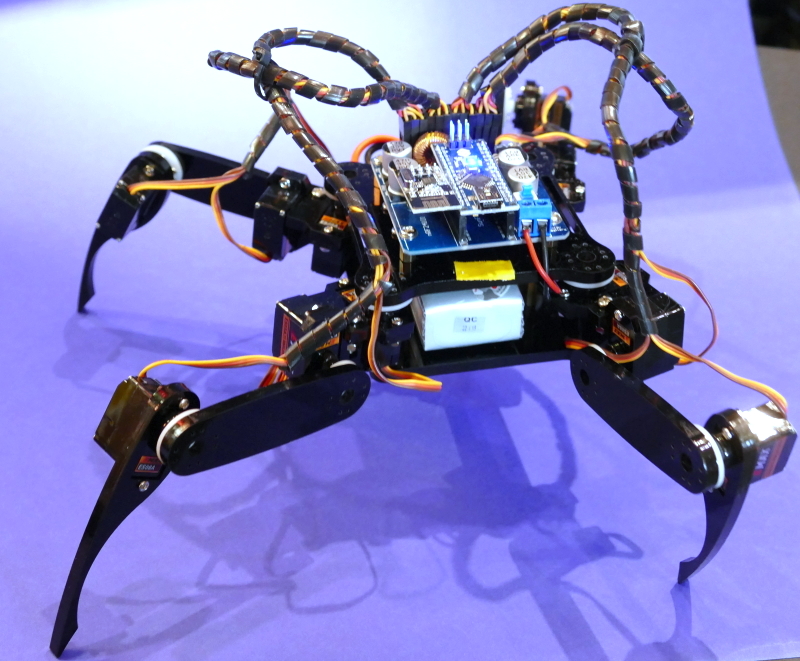
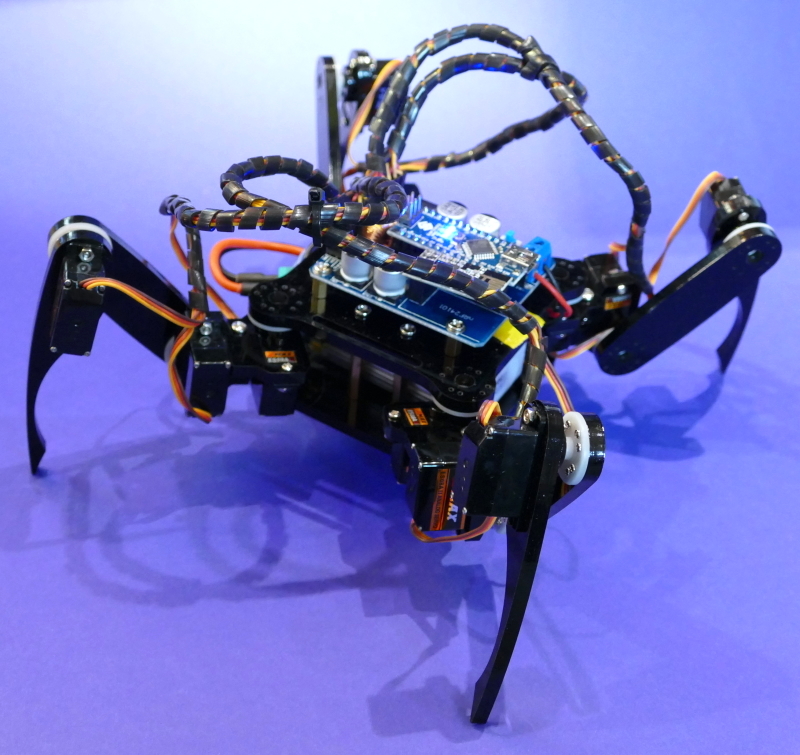
So sieht die Krabbe in der Parkposition aus:
Es sind standardmäßig zwei Programme bei der Krabbe: Tanzen und Laufen. Die beiden Programme sind rudimentär, zeigen aber die Beweglichkeit des Roboters.
Ab hier könnte man sagen: fertig. Aber ganz so ist es dann doch nicht :-)
Der Roboter hat keine Sensoren. Die Lauf-Software kennt nur vier, nicht kombinierbare Gangarten: vorwärts, rückwärts, links, rechts. "sitz" und "steh" kann sie auch noch. Aber da geht bestimmt noch mehr.
So könnte der Joystick komplett genutzt werden, um währen des Laufens verschiedene Radien zu gehen. Der Arduino des Senders hat genügend Analogkanäle um auch die Geschwindigkeit und Laufhöhe des Roboters zu bestimmen. An Sensoren sind Antikollisionssensoren (Ultraschall für 5EUR) denkbar. Die Arduino-Libraries bieten da eine einfache Erweiterungsmöglichkeit.
Die Servos könnten stromüberwacht (z.B. INA139) werden und so könnte die Krabbe fühlen, wo sie gerade hin tritt. Last but not Least ist es durch die Arduino-Plattform möglich, den 16MHz Arduino Nano durch z.B. einen Teensy 3.6 (https://www.sparkfun.com/products/14057) zu ersetzten. Damit stehen 180MHz/32bit zur Verfügung. Die Entwicklungsoberfläche Arduino-IDE bleibt gleich, Libraries und Code können zumindest zum Teil weiter benutzt werden. Ein paar Leuchtdioden-Augen sind natürlich auch möglich.
Hier ein paar Videos (nicht meine):
Herstellervideo:
Schön gemachtes Video:
Verbesserungen: