
Nun wollte ich doch einmal mit dem Kunstflug anfangen. Ein geeigneter Kandidat war schnell gefunden die YAK54 Carbon-Z von E-flite - angeblich unzerstörbar, kräftig und fertig gebaut - da tut es dann doch nicht so weh, wenn das Teil in den Acker steckt. Also gleich bestellt.
Die Eckdaten waren (Herstellerangaben/Händlerangaben):
Spannweite 1220mm
Länge 1230mm
Gewicht 1730g
Akku 4s 2800mAh
Tragflächenfläche (-inhalt) 34dm^2
Flächenbelastung 50,14g/dm^2
Geschwindigkeit: 113km/h
Schubverhältnis 2:1
Luftschraube 12x5,5
Zum Glück war das Teil 2 Monate nicht lieferbar und ich habe mich noch einmal eingehend im Internet kundig gemacht. Dort konnte ich mehrfach lesen, dass es mit der Robustheit nicht weit her ist. Es gibt Berichte, daß die YAK54 ohne "Feindeinwirkung" in der Luft bei relativ harmlosen Figuren zerbricht - und komischer Weise immer an der gleichen Stelle (hinter der Kabinenhaube). Das lässt einen Konstruktionsfehler vermuten. Außerdem las ich, daß die YAK ohne Motorkraft wie ein Backstein runter kommt.
Ich stornierte meine Bestellung und suchte nach einer probaten Alternative. Durch meinen Modellbauhändler kam ich auf die Acromaster von Multiplex.

Die ist von der Größe vergleichbar mit der YAK, die Flächenbelastung ist deutlich geringer und auch die Berichte im Internet waren überwiegend positiv. Allerdings habe ich nicht den Multiplex-Antrieb gekauft (habe schon zwei von den Teilen kurz nach dem Kauf mangels Leistung wieder raus geschmissen) sondern gleich beim Natterer den "Antriebssatz Acromaster Art.Nr.: 181332". Dieser verspricht 20% mehr Leistung bei gleichem Strom und geringeren Kosten.
Hier sind die Bestandteile des Antriebssatzes zu sehen:

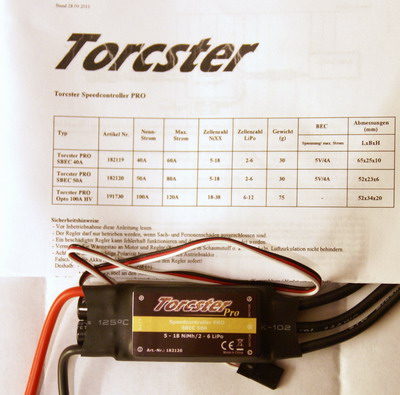
Hier zu sehen der Torcster Motor mit Luftschraubenmitnehmer und der passende Regler mit integriertem SBEC


Mit im Set: ein Stück Schrumpfschlauch, ein gefräster Motorspant, Schrauben, 3 Goldsteckhülsen für den Regleranschluß und eine 13x6er Luftschraube von Graupner.
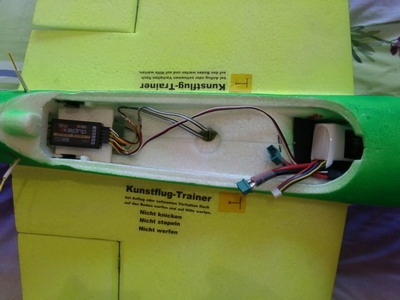
Hier ist der "normale" Einbau in die Acromaster zu sehen:

Leider liegt der Acromaster ein unscheinbarer Waschzettel "Produktpflegehinweis #82 5842 Blatt 1 Ver. 1.0" bei, in dem mehr oder weniger verklausuliert steht, daß die Motorbefestigung für das Modell kritisch ist, d.h. nur den Original-Multiplex Motor und Latte verwenden, nur den Elapor-Spinner verwenden und wenn der Motor dann doch aus der Verankerung gerissen wird, waren irgend welche Befestigungsschrauben zu lose. Das finde ich besonders hart, denn der ganze Antriebsstrang wird kräftemässig nur an zwei Schrauben gehalten, die in zwei ABS-Plastikteile geschraubt sind. Da die beiden ABS-Teile auch nocht getrennt sind, können Vibrationen und Kreiselkräfte nach herzenslust in das Elapor rein arbeiten. Die anderen vier Schrauben sind für die Einstellung von Motorsturz und -zug zuständig und üben zusätzlichen Druck auf die beiden Befestigungsschauben aus.
Etwas zu fest angezogen, und die Gewinde (M3) im Plastik sind überdreht. Etwas zu locker angezogen und die Kreiselkräfte an der Latte machen aus der Nase der Acromaster Kleinholz. Das hat mich ein paar Grübel-Stunden gekostet. Für das Problem gibt es ja mehrere Lösungen.
An anderer Stelle las ich, daß die Acromaster in der Originalbauweise auch noch zu Kopflastigkeit neigt.
In Summe bedeutete das für mich: der Motorträger muss verstärkt werden, ohne das Gewicht zu erhöhen :-) . Vom Internet übernahm ich den Tipp, die beiden Servos für Seiten- und Höhenruder nach hinten zu verlegen um die Kopflastigkeit auszugleichen und eine präzisere Anlenkung zu bekommen.
Zur Verstärkung des Motorträgers entschloß ich mich, den Bereich des Motorträgers mit Glasfasermatten und Uhu Schnellfest zu verstärken.
Dazu habe ich beide Rumpfhälften so vorbereitet:


Auf dem folgenden Bild sind die beiden Rumpfhälften zu sehen:

Bei der Gelegenheit habe ich noch drei Carbon-Flachprofile (3x1mm) in den Rumpf eingearbeitet. Das untere und mittlere Flachprofil gehen konsequent von hinten bis fast ganz nach vorne durch den Rumpf. An den Außenseiten habe ich die beiden ABS-Röhren in die vorgesehenen Rillen geklebt. Damit ergibt sich ein drucksteifes Endoskelett mit seitlichen Zugsteifen Röhren. Das sollte erst einmal stabil sein.
Durch das nach hinten Verlegen der beiden Servos müssen die Kabel Verlängert werden, was ich traditionell durch löten machte, da ich kein Freund von überflüssigen Steckverbindern bin (Fehlerquelle). Die Kabel sind so in den Rumpfhälften verlegt, daß sie mechanisch nicht belastet werden können.
Anschliessend habe ich nach dem Bauabschnitt "Beide Rumpfhälften miteinander verkleben" die Ober- und Unterseite (Rumpfinnere) mit Glasfasermatten und nochmals UHU Schnellfest armiert. Das geschieht über die Rumpföffnung für dem Motor und ist sehr Nervenaureibend. Nach dem Aushärten sind die beiden Motorträger fest über einen tragenden GFK-Ring miteinander verbunden. Der Ring seinerseits ist großflächig mit dem Elapor-Rumpf verbunden.
So sieht die Seitenruder-Servoanlenkung aus:

Das Servo ist hinter einer Depron-Platte verschwunden. Durch die beiden im Rumpf eingearbeiteten Karbon-Flachprofile die sich bis zum Spornrad ziehen, habe ich auch keine Bedenken wegen der Strukturschwächung durch den Ausbruch für das Servo.
Das Höhenruder-Servo sitzt vor dem Höhenleitwerk:
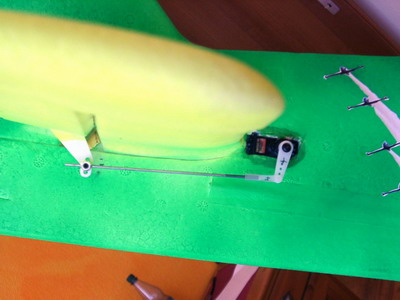
Da es wegen der Ruderanlenkung relativ weit außen sitzt, mach hier eine Verblendung keinen Sinn.
Nach dem Zusammenbau stellte sich die Kopflastigkeit als "Mär" heraus. Meine Acromaster war eher Schwanz- als Kopflastig. Der Akku muß relativ weit nach vorne Richtung Motor rutschen. Die Servos hätten also durchaus in den vorgesehenen Aussparungen bleiben können.
Mitte Januar war dann der erste Termin für Fotoshooting und kurzem Erstflug, der mich aber noch nicht überzeugt hat:

Die beiden "Hörnchen" hinter der Haube sind zwei ABS-Röhrchen im Winkel von 90° durch die die beiden Antennen des Jeti-Empfänger geführt sind. Der Entfernungstest ergab super Werte (Sender im Entfernungstest-Modus), 50m Entfernung (gemessen mit GPS) und ich konnte eine Signalstärke von 4-5 ablesen.


Hier sieht man, daß die beiden Antennen des Duplex-Empfängers total stressfrei und biegungsarm durch die Röhrchen geschoben sind. Die Montage ist damit sehr einfach. Der 90°-Winkel stellt sicher, daß eine Antenne immer eine gute Empfangssituation hat.
Der Elaporspinner hat ein Wendel bekommen.






| Spannweite | 1095 | mm |
| Länge | 1150 | mm |
| Leergewicht | 920 | g |
| Abfluggewicht | 1130 | g |
| Akku | 3s 2600mAh 25C | |
| Motor | Torcster A3548/5-900 | |
| Regler | Torcster Speed Pro SBEC 50A | |
| Luftschraube | 13x6 G-Sonic, Graupner | |
| Empfänger | Jeti Duplex 6 2.4Ex | |
| Servos | 4xHS-5065 MG Digi | |
|
Flugzeit |
6:45 (moderater Kunstflug) | |
| Schub | 2160 | g |
| Schubverhältnis | 1,91 | |
| Strom (Vollast) | 39,2A (Anfang) 38A (gemessen nach 5s) |
A |
| Strom (Schnitt) |
9,7 (normaler Flug) |
A |
| Steigleistung | 9,4 | m/s |
| Gleitleistung | 8,9 (Backstein) | m/s |
| Drehzahl | 8850 | U/min |
| Geschwindigkeit |
113 (max) |
km/h |
| Fläche | 36,6 | dm^2 |
| Flächenbelastung | 30,87 | g/dm^2 |
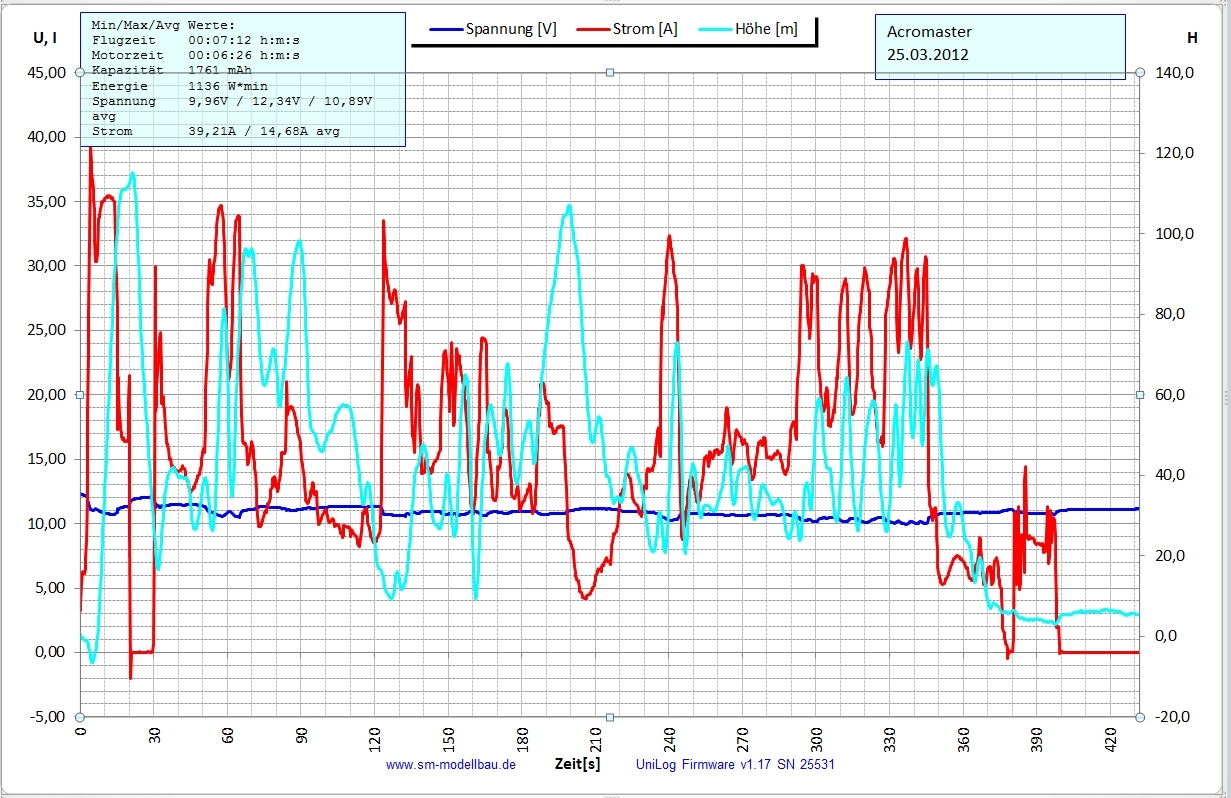
Die Werte, im Vergleich zur YAK können sich sehen lassen. Insbesondere die Flächenbelastung ist deutlich geringer. Das Schubverhältnis ist geringfügig geringer, aber der Motor und der Regler vertragen auch 4s. Damit sind laut DriveCalc bei 36,4A 2564g Schub drin (12x6er Schraube). Alle Messungen wurden mit einem UniLog (80A-Sensor, opt./el. Drehzahlsensor) und einem GPS-Logger der Firma SM-Modellbau durchgeführt.
-----Nachtrag 27.2.2012:
Endlich konnte ich ein sehr kurzes Video machen. Nach 2 Minuten und einem moderaten Looping hat sich der Motor gelockert. Im Video kann man das auch hören. Bei der Gelegenheit habe ich auch gleich meinen neuen GPS-Logger von SM-Modellbau eingeweiht. Der wird mir in Zukunft viele neue Informationen liefern.
Nach der Landung fehlte eine Justierschraube (rausgewackelt) und alle restlichen Schrauben waren locker. Ich habe jetzt alle Schrauben mit Schraubensicherungslack versehen und noch einmal ordentlich angezogen. Vielleicht hilft es.
---Nachtrag 08.04.2012:
Nach nunmehr mehereren Flügen und einigen härteren Landungen steht fest, dass das Nachziehen der Schrauben und der Schraubensicherungslack etwas gebracht haben. Der Motor sitzt fest (Endlich!!!).
Nun zu den Messungen. Hier ist ein Flug zu sehen (leichter Kunstflug), langgestrecktes Steigen, Sinken, Horizontalflug mit Vollgas, Aushungern...
Mit dem GPS-Logger von SM-Modellbau sieht nun der Start (nur ein Segment der Aufzeichnung) so aus:
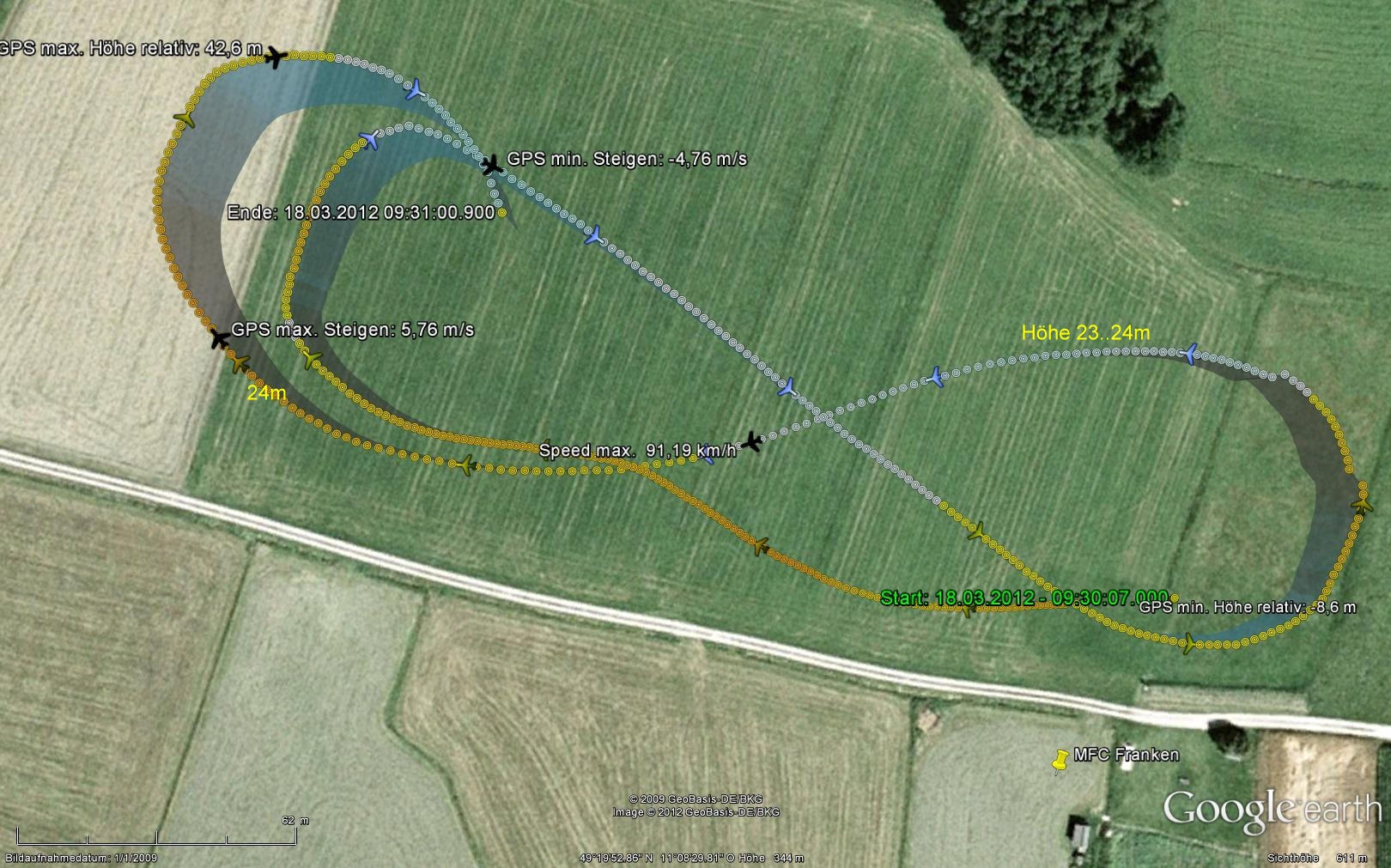
Stellt man den ganzen Flug in Google dar, so ergibt das ein unübersichliches Kneul ohne Nutzen.
Der Landeanflug, aus dem ich die Geschwindigkeit ermittelt habe, stellte sich so dar. (Weil die Acromaster unter 30km/h recht kippelig geworden ist bin ich wieder etwas schneller geworden):
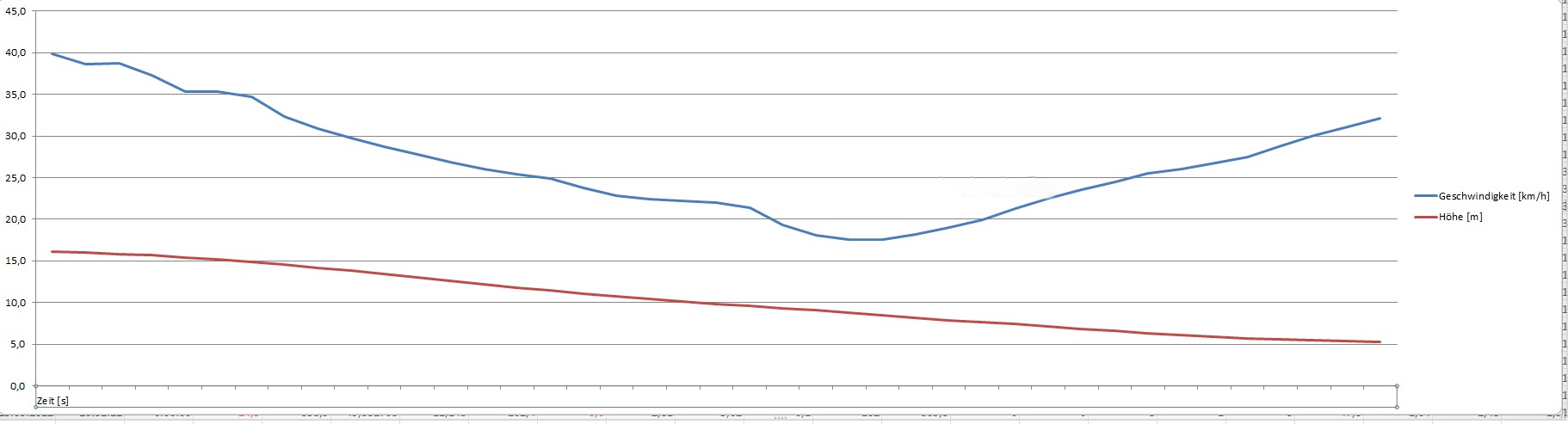
Die Aufzeichnung erfolgte mit 10 Messwerten pro Sekunde.
Fazit: Die Acromaster ist aus meiner Sicht eine harmloser, neutral fliegender Trainer für Kunstflug. Richtig Geschwindigkeit geht mit dem Setup nicht. Dagegen ist jede Menge Kraft für Steigflüge vorhanden. An die Maximalausschläge muß man sich vorsichtig rantasten, oder das Modell reparieren, denn für mich hat das ausschalten der Dual-Rate einen heftigen Rodeo-Ritt gebracht, bis ich das Flugzeug wieder unter Kontrolle hatte (und den Schalter wieder gefunden hatte, um die Dual-Rate einzuschalten).
Derzeit fliege ich mit 50% Dual-Rate auf allen Rudern. Die Expo ist beim Querruder auf 30%, auf den anderen Rudern auf 50%.
Hier ein kleines Video: