
Leider gibt es im Internet kaum Informationen oder Messungen mit dem Micro-Impeller EDF 40 von GWS. Aus diesem Grunde habe ich mir einen kleinen Teststand gebaut, der wenigstens einige Anhaltspunkte liefern sollte.
Den Teststand habe ich in Erwartung eines geringen Schubs und der Einfachheit aus Depron gebaut. Der Aufbau bekam 4 kleine Carbon-Bölzchen, die genau in die Grundplatte der Waage greifen. Konstruktionsbedingt mußte ich den Impeller mit den Kopf nach unten einbauen, damit er auf die Waage drückt. Das hat auch einen positiven Aspekt wegen der Ströhmung, da die Ansaug-Seite dadurch nicht so kritisch sein muß (ungerichtet).
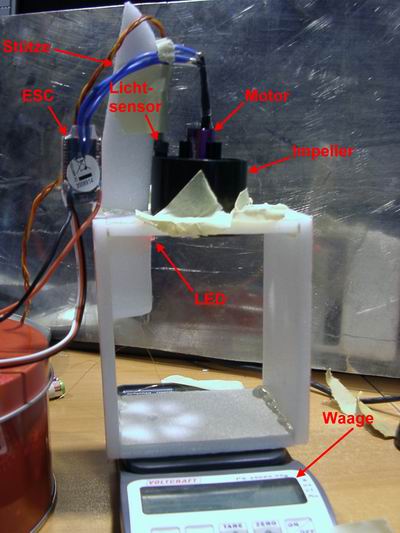
Als Test-Setup habe ich das Unilog-System von SM-Modellbau benutzt. Das ist wirklich klasse für so was. Mit diesem Aufbau war ich in der Lage, Spannung, Strom, Drehzahl und Schub gleichzeitig zu erfassen. Da der optische Drehzahlsensor etwas empfindlich auf zu wenig Licht ist, habe ich dem Aufbau noch eine LED spendiert, damit eine echte Lichtschranke entsteht.
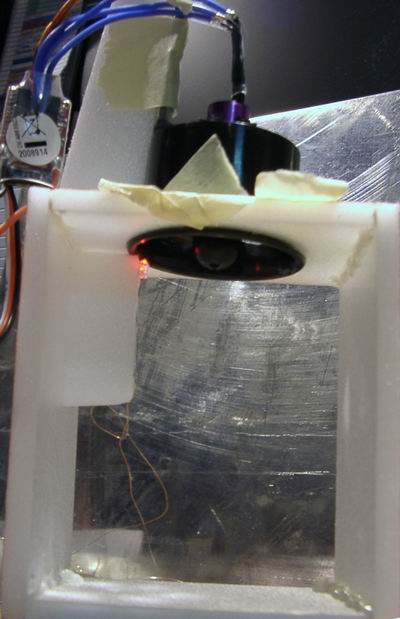
Auf diesem Bild sieht man die rote LED.
Hinter dem Impeller habe ich die Kabel versucht möglichst Ströhmungsgünstig zu verlegen. Der Impellerstrahl kann so ungehindert nach oben abblasen.
Nun zu den Meßwerten:
Mit dem eingebauten Bürstenmotor (2s) habe ich im Stand folgende Werte ermittelt:
| U [V] | I [A] | P [W] | Drehzahl [U/Min] | Schub [N] |
| 7,9 | 0,44 | 3,48 | 12.900 | 0,1 (10g) |
| 7,7 | 0,80 | 6,13 | 18.132 | 0,2 |
| 7,4 | 1,16 | 8,58 | 21.723 | 0,3 |
| 6,7 | 3,9 | 26,13 | 32.000 | 0,65 |
Mit einem Hacker E10-28L (2s) sind nahezu identische Werte zu erzielen:
| U [V] | I [A] | P [W] | Drehzahl [U/Min] | Schub [N] |
| 7,8 | 0,39 | 3,04 | 13.342 | 0,1 (10g) |
| 7,6 | 0,82 | 6,21 | 18.454 | 0,2 |
| 6,7 | 3,96 | 26,39 | 32.018 | 0,65 |
Den EDF40 mit einem 2s-Akku zu betreiben bringt unabhängig vom Brushed-/Brushless-Motor maximal 65g/0,65N Schub.
Ich habe im letzten Versuch den Hacker E10-28L mit 3s betrieben. Dabei stellte sich heraus, daß der optische Drehzahlsensor für die erzielte Drehzahl (6-Blatt Rotor= 3x höhere Frequenz als normal) nicht mehr ging. Aus diesem Grund habe ich die Versuchsanordnung mit einem BL-Drehzahlsensor modifiziert.
Hier der Versuchsaufbau:

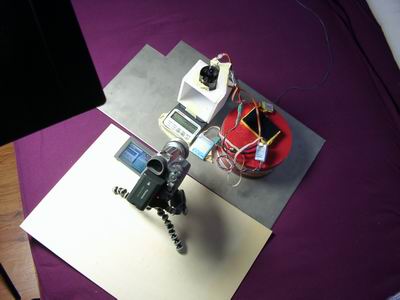
Den Versuch habe ich live mitgeschnitten damit man den Impeller auch einmal hört. Leider hatte ich beim Drehzahlsensor vergessen den Sensor umzustellen. Die Angezeigte Drehzahl ist nur 1/6 der tatsächlichen Drehzahl.
Hier das aufgenommene Diagramm:
| U [V] | I [A] | P [W] | Drehzahl [U/Min] | Schub [N] |
| 12,42 | 0,16 | 1,99 | 9252 | 0,05 (5g) |
| 12,39 | 0,28 | 3,47 | 12.390 | 0,98 (10g) |
| 12,31 | 0,62 | 7,63 | 17.670 | 1,96 (20g) |
| 12,25 | 0,99 | 12,13 | 21.228 | 2,94 (30g) |
| 12,16 | 1,45 | 17,63 | 24.120 | 3,92 (40g) |
| 12,09 | 1,82 | 22,00 | 26.676 | 4,91 (50g) |
| 12,05 | 2,25 | 27,11 | 29.694 | 6,38 (65g) |
| 11,94 | 3,07 | 36,66 | 33.234 | 7,95 (80g) |
| 11,79 | 4,23 | 49,87 | 37.728 | 9,32 (95g) |
| 11,34 | 7,87 | 89,25 | 50.088 | 17,07 (174g) |
Eckdaten des E10-28L:
5500Kv, 28Windungen, 2 Pole, Leerlaufstrom 0,5A, Ri=0,326, 14g Timing 0°..5° 8kHz
Maximale Temperatur: 65°C
Maximale Leistung: 45W (15s) 58W kurzzeitig
Maximale Umdrehungszahl: 45.000 U/min