
alles Mögliche
- Details
- Hits: 7033
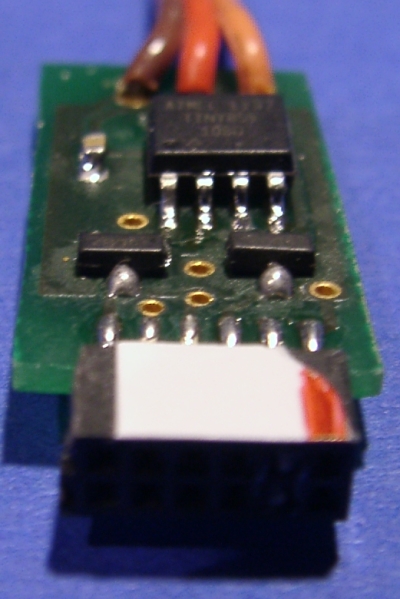
Nach ziemlich genau einem Jahr gibt es jetzt eine neue JetiLog-Version.
Nach dem Jahr Testphase hat sich der JetiLog oftmals als sehr nützlich herausgestellt und einige Flugparameter konnten nachträglich einfach analysiert werden. Allerdings hatte das gute Stück einen Haken. Wenn ich nicht zügig die Dateien von der SD-Karte gezogen habe, waren irgendwann so viele Dateien auf der Karte, dass ich meine Not hatte, die Logs den einzelnen Flügen/Flugzeugen zuzuordnen. Machmal klappte es noch über die Zellenzahl und dem Stromverbrauch. Zur Erinnerung: Der JetiLog2 hat pro Einschalten des Senders ein Logfile mit fortlaufender Nummer aufgemacht.
Im Herbst 2015 fand ich bei Reichelt-Elektronik einen sehr interessanten Baustein, den RV-3029 C2. Dieser Baustein ist ein kleiner Chip, der eine Echtzeituhr eine Backup-Batterieumschaltung und den Quarz integriert hat. Das Teil ist außerdem temperaturkompensiert, läuft mit 5,5V..1,4V und lässt sich einfach mit einer I2C-Schnittstelle ansprechen. Was brauch man mehr?
- Details
- Hits: 10127
...die Alternative, wenn nichts anderes mehr bleibt
|
|
Nach den Erfahrungen mit den Pro-Control-Reparaturen habe ich den Entschluß gefasst, selbst ein paar Platinen zu machen - so einfach wie möglich. Unbedingt erforderlich ist im Prinzip eine CPU und einige Schaltmodule. Zuerst wollte ich Lowside-Treiber nehmen. Allerdings fielen die dann wieder der Vernunft zum Opfer. Wenn man weiß was man tut und nur LEDs ansteuern will, reichen auch N-Kanal-FETs. Diese sind billig und können dank niedrigem Einschaltwiderstand richtig viel Strom ab. Die Stromversorgung für den Prozessor nehme ich aus dem Empfänger (Servokanal). Gleichzeitig kann über diese Verbindung das Leuchtverhalten der LED beeinflusst werden. |
Read more: ELSE (Elektronische Licht Steuer Einheit) updated
- Details
- Hits: 13283
LEDs zur Beleuchtung sind schon klasse. Kleine Leuchtdioden kann man leicht mit einem Vorwiderstand zum Leuchten bringen. Wird der Strom allerdings größer oder ist die Spannungsdifferenz zwischen Versorgungsspannung und LED-Vorwärtsspannung zu groß, dann wird es dem Vorwiderstand schnell sehr heiß. Das Zauberwort ist die Verlustleistung, also Spannungsabfalll x Strom. Die Grenze bei handelsüblichen Widerständen (1/4W...1W) liegt bei knapp 0,5W.
Alles was darüber geht, braucht eine intelligentere Lösung. Meine Lösung für dieses Problem ist mein WITZ-Modul (Widerstand Ist Thermisch Zwecklos). Dieses Modul ist eine Stromquelle und kann Leuchtdioden bis zu 2A treiben - das ist ein Wort. Die Schaltung funktioniert bis 6s-Akkus.
- Details
- Hits: 7546
Ich bin ja bekennende Jeti-Fanin :-). Die Telemetrie ist klasse und durch das offene System gibt es viele Komponenten auch von unterschiedlichen Lieferanten. Eine Sprachausgabe von von VSpeak rundet alles ab. Eine Sache hat mich aber bisher immer geärgert: meine Telemetriedaten werden auf der Jeti-Box angezeigt, auf dem Kopfhörer angesagt, aber nirgends gespeichert.
Mit einer Jeti-Profibox können die Daten geloggt werden, aber die Box kostet 170EUR und hat einen eigenen Akku - Obsoleszenz lässt grüßen. Die Box hat einen eingebauten Sender, aber der harmoniert laut Internet nicht mit dem VSpeak-Sprachmodul, ein Umstand den ich nicht mehr missen möchte. Dann gibt es noch die Druidbox. Eine kleine Box die die angezeigten Informationen auf Bluetooth übersetzt. Mit einem Smartphone kann dann das gesendete aufgezeichnet werden. Etwas kompliziert und ein weiterer 2,4GHz-Sender durch das Bluetooth.
Warum nicht die Daten am Kabel der Jetibox einfach abgreifen (das Protokoll hat Jeti veröffentlicht) und die Daten auf eine SD-Karte zu schreiben.